Using Rubik's cube to improve and evaluate robot manipulation
4.8 (341) · € 33.99 · En Stock
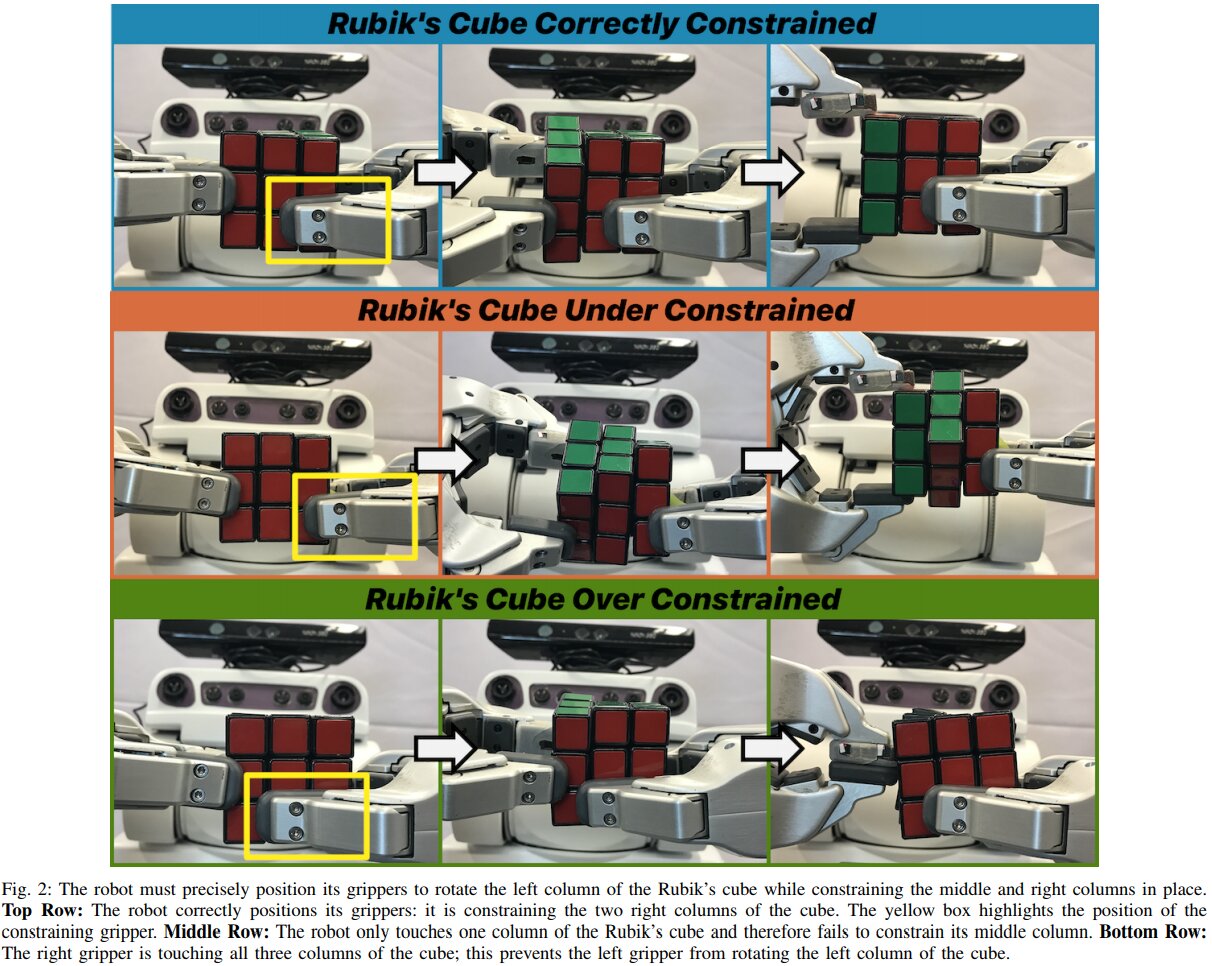
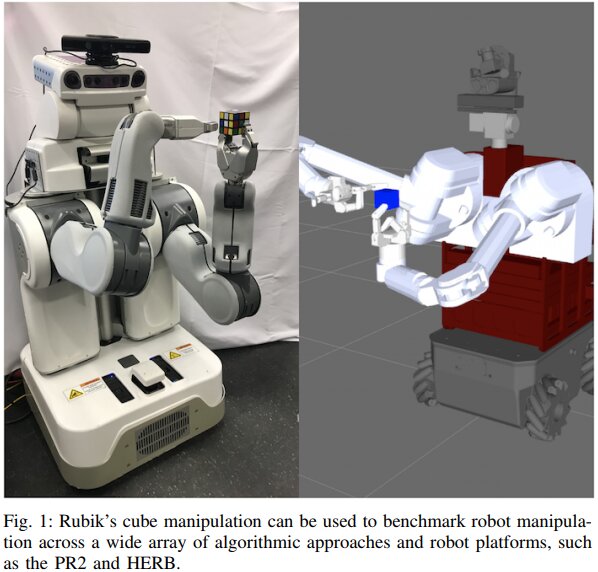
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on the Rubik
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on the Rubik's Cube, the well-known 3D combination puzzle invented by the Hungarian sculpture and architect Ernő Rubik.

The robot is able to precisely manipulate the Rubik's cube using the

Parameter Estimation for Deformable Objects in Robotic Manipulation Tasks
Sensors, Free Full-Text

Rubik's Cube Manipulation Using a High-speed Robot Hand

Research talk: Project Dexter: Machine learning and automatic decision-making for robotic manipulation - Microsoft Research
Using Rubik's cube to improve and evaluate robot manipulation
Autonomous grasping robot with Deep Reinforcement Learning

Rise of the robogeeks
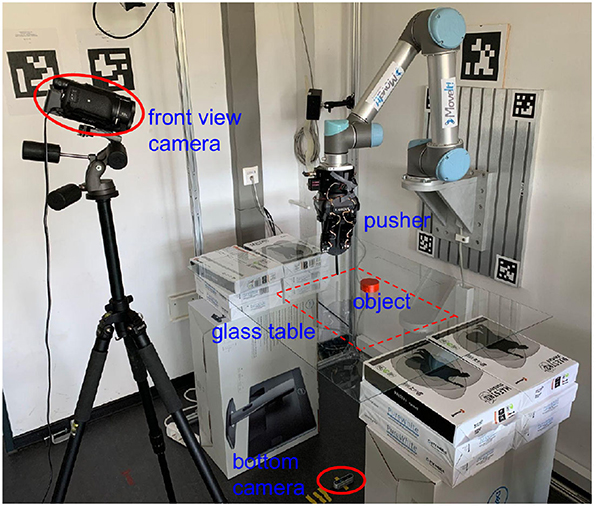
Frontiers Reinforcement Learning With Vision-Proprioception Model for Robot Planar Pushing

Robot hand solving Rubik's Cube is one step closer to robots that can solve problems without humans - The Washington Post
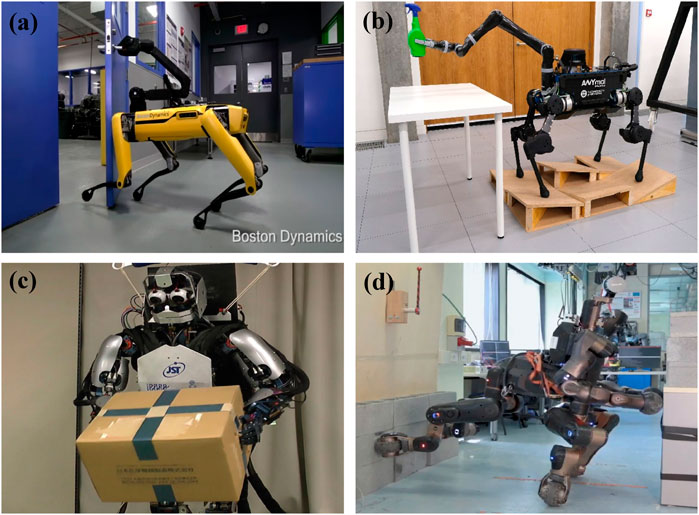
Frontiers Legged robots for object manipulation: A review