- Accueil
- parcours de drone
- Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
4.6 (739) · € 20.99 · En Stock

We tackle the problem of flying time-optimal trajectories through multiple waypoints with quadrotors. State-of-the-art solutions split the problem into a pla

Automated vision-based structural health inspection and assessment for post-construction civil infrastructure - ScienceDirect
Aerospace, Free Full-Text

Residual dynamics learning for trajectory tracking for multi-rotor aerial vehicles

Robert Pěnička hat etwas auf LinkedIn gepostet

NeuroBEM: Hybrid Aerodynamic Quadrotor Model (RSS 2021)

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight

CMPCC: Corridor-based Model PredictiveContouring Control for Aggressive Drone Flight
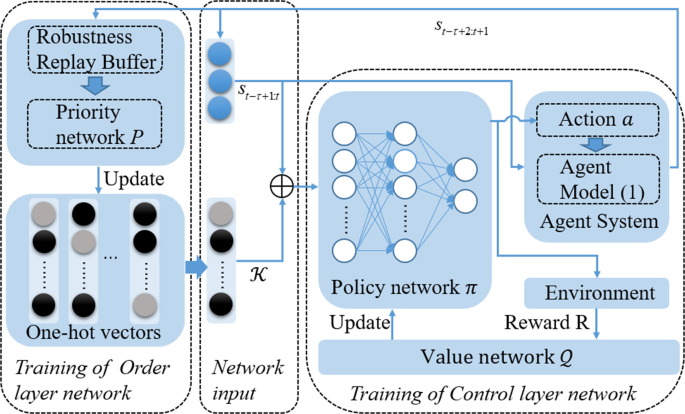
A Dual-Layer Network Deep Reinforcement Learning Algorithm for Multi-objective Signal Temporal Logic Tasks

Residual dynamics learning for trajectory tracking for multi-rotor aerial vehicles

PDF) A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight
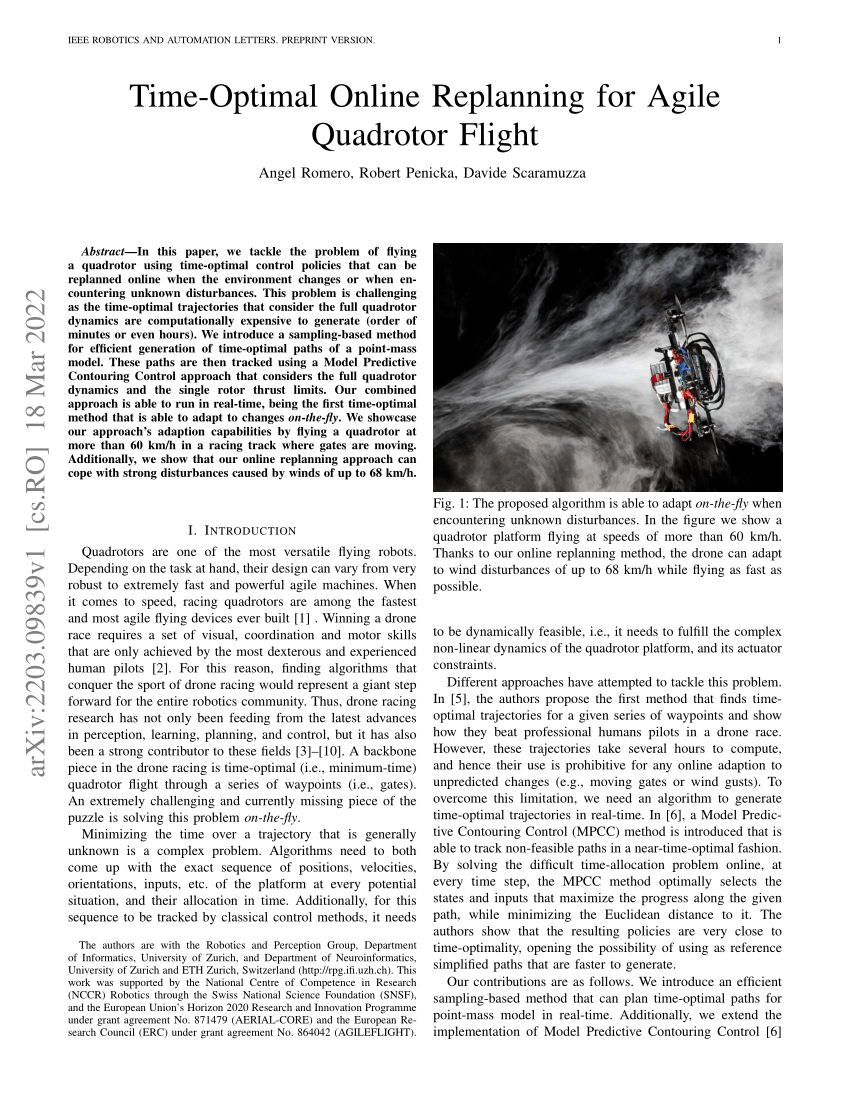
PDF) Time-Optimal Online Replanning for Agile Quadrotor Flight

PDF) Model Predictive Contouring Control for Near-Time-Optimal Quadrotor Flight











